A STUDY OF GYROSCOPIC CONTROL OF SMALL CRAFTS:
A CASE STUDY OF THE USE OF THE MOVING FRAME METHOD
As a bachelor project, Håkon Teigland, Joakim Nyland, Martin Lied, Caspar Smith and Andreas Flåten have studied and analysed the use of active gyroscopic stabilizers on small crafts. With help and guidance from Professor Thomas J. Impelluso, an IMECE article has been produced, this web-page and a 3D-web animation of the results.
- Left mouse: rotation
- Middel mouse/scroll: zoom
- Right mouse: panning
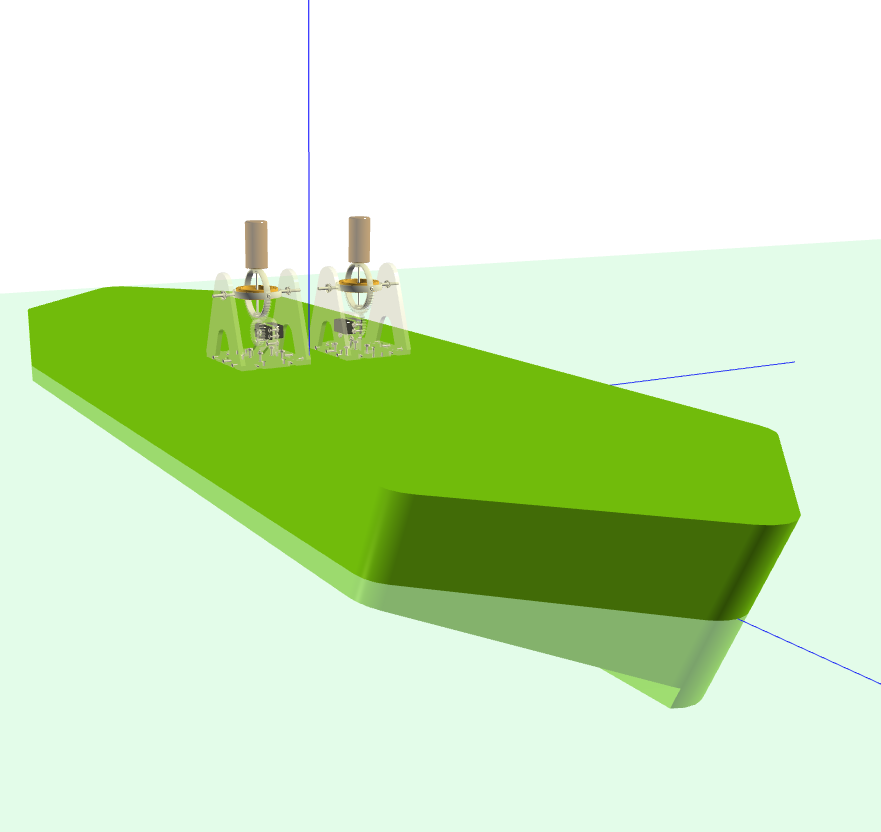
WEBGL ANIMATIONS BASED ON MOVING FRAME METHOD IN DYNAMICS
Papers and Codes
IMECE2017-70108
IMECE2017-70109
HVL BACHELOR
MATLAB Code
Symbolic Equations
Numerical Analysis
Javascript Code

3D animation
Hyrdo mechanics
Contact Us
Håkon Teigland
Marine Engineer
Department of Mechanical and Marine Engineering
Western Norway University of Applied Sciences
Bergen, Norway
E-mail:
teiglandh@gmail.comJoakim Nyland
Subsea Engineer
Department of Mechanical and Marine Engineering
Western Norway University of Applied Sciences
Florø, Norway
E-mail:
joakim_f_n@hotmail.comAndreas Flåten
Marine Engineer
Department of Mechanical and Marine Engineering
Western Norway University of Applied Sciences
Bergen, Norway
E-mail:
andreas_flaten@live.comMartin Roll
Marine Engineer
Department of Mechanical and Marine Engineering
Western Norway University of Applied Sciences
Bergen, Norway
E-mail:
martin.roll.lied@gmail.comCaspar Smith
Marine Engineer
Department of Mechanical and Marine Engineering
Western Norway University of Applied Sciences
Bergen, Norway
E-mail:
casparsmith0706@hotmail.com
Thomas J. Impelluso
Professor
Department of Mechanical and Marine Engineering
Western Norway University of Applied Sciences
Bergen, Norway
E-mail:
tjm@hib.no