My Doctoral Project
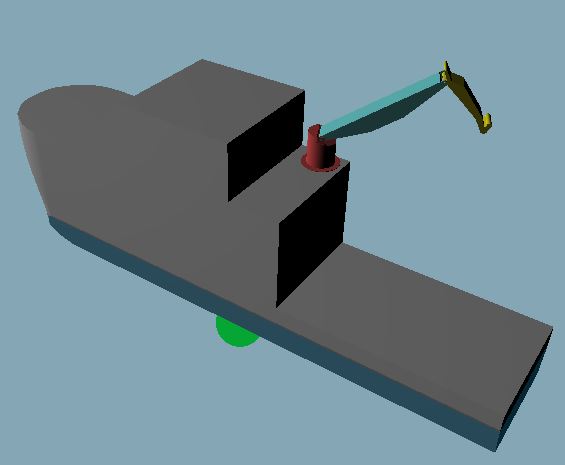
The project aims to develop a data-informed simulation of ship rotation (pitch, yaw, roll) and translation (surge, heave, sway) induced by on-board crane motion, waves and wind, in an effort to anticipate crane operations.
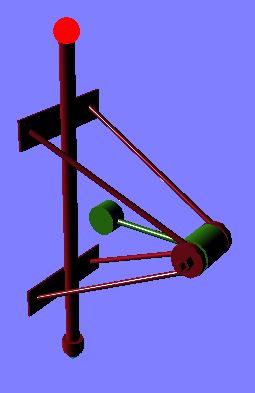
Integrating the Processes of Mechanics
To simulate the physical strain and motion of the ship and crane I will endeavour to integrate the processes of mechanics. Finite element(FEM), Multi Body Dynamics(MBD) and Finite Difference (CFD).
Weather Data
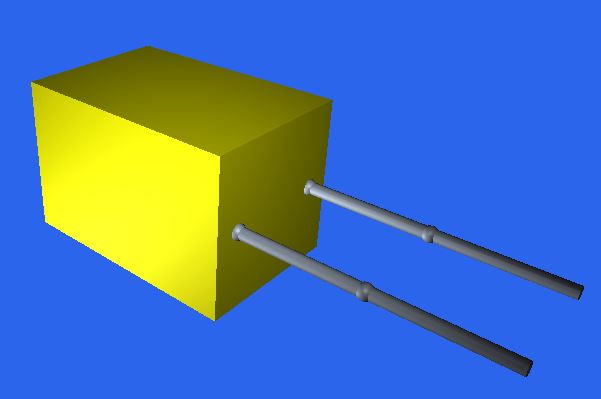
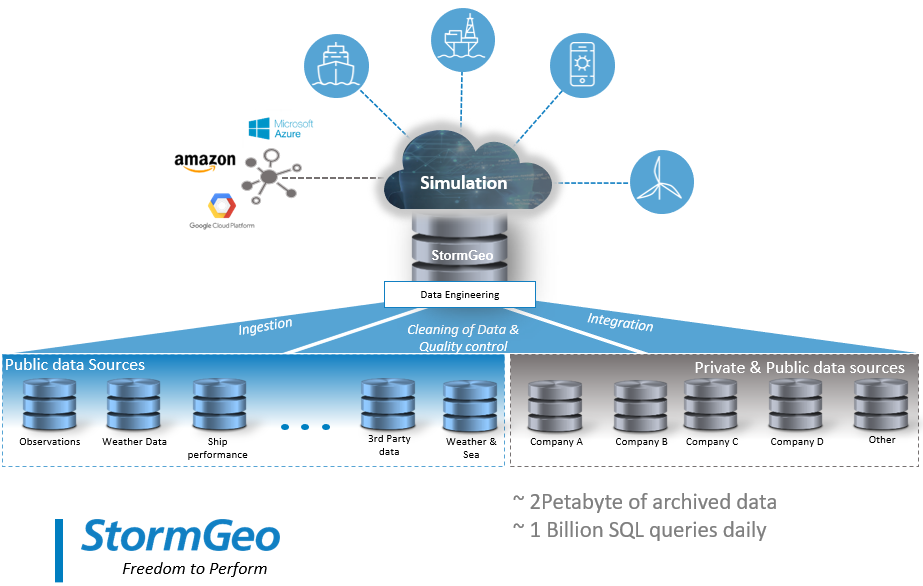
 To enable the data-informed simulation, I have a collaboration with StormGeo. They are very interested in the project
and have granted me access to their weather data server. The simulation will access the server and give needed data on the wave and wind conditions for the vessel.
To enable the data-informed simulation, I have a collaboration with StormGeo. They are very interested in the project
and have granted me access to their weather data server. The simulation will access the server and give needed data on the wave and wind conditions for the vessel.
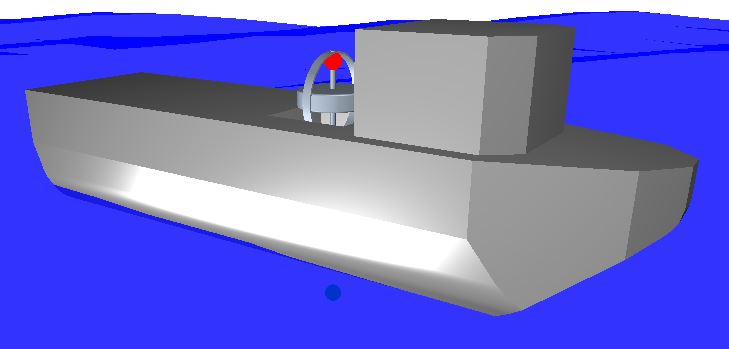
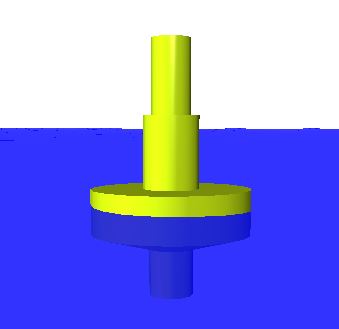
Experimental
I will build a ship model fitted with a working crane to test and validate the simulations in the wave tank at HVL